




 结构、特点
结构、特点
【结构】采用实现高精度的结构。
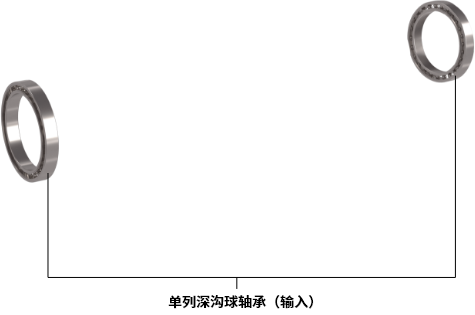


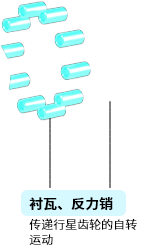


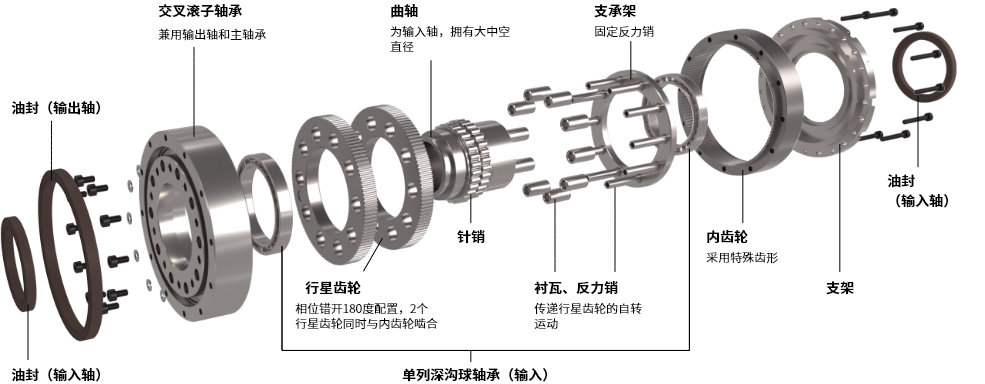
・随着作为输入轴的曲轴的旋转,在2个行星齿轮公转的同时自转,
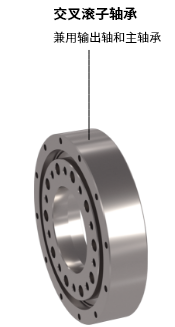
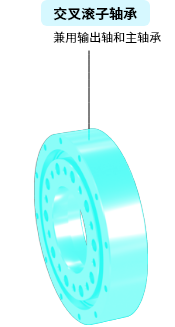
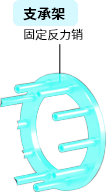
该自转运动通过反力销和衬瓦传递给作为输出的交叉滚子轴承。
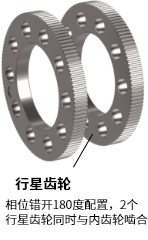
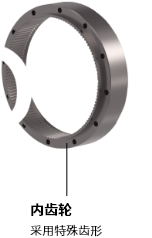
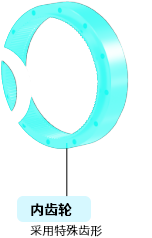
・虽然是1级减速,相位相差180°的2个行星齿轮同时
与内齿轮啮合,避免旋转时的失衡。
【特点】高刚性、高转矩 、大尺寸中空内径
采用偏心摆动型差动减速机构,实现了高扭转刚性、容许扭矩。即使减速比发生变化,齿轮的啮合率也几乎不变,可以低减速比获得大转矩。大中空直径易于配线、配管、轴等穿过,大幅度扩展了机器人及设备的设计自由度。有助于提高生产效率。

追求较高性能的设计。
采用差动减速机构(偏心摆动轴),实现了高扭转刚性和容许转矩。此外,还采用与输出轴形成一体的交叉滚子轴承,不仅体积小,而且还确保高力矩刚性。即使减速比发生变化,齿轮的啮合率也几乎不变,容许转矩恒定。低减速比也可获得大转矩。

大尺寸内径使设计更自由。
大尺寸内径不仅有易于配线、配管、连接轴等穿过,还便于增加配线数量、便于将粗线收纳到箱体内。可避免与机器人主体及周边设备发生干涉,减轻弯曲、拉扯等负荷。

通过视频介绍高刚性减速机的结构。
公开日期:2022.4.29 点击图像可观看视频。
视频使用腾讯视频。